
Servicio de escáner 3D corto alcance: El escaneado 3D o digitalización 3D es la técnica que nos permite obtener modelos tridimensionales de objetos físicos.
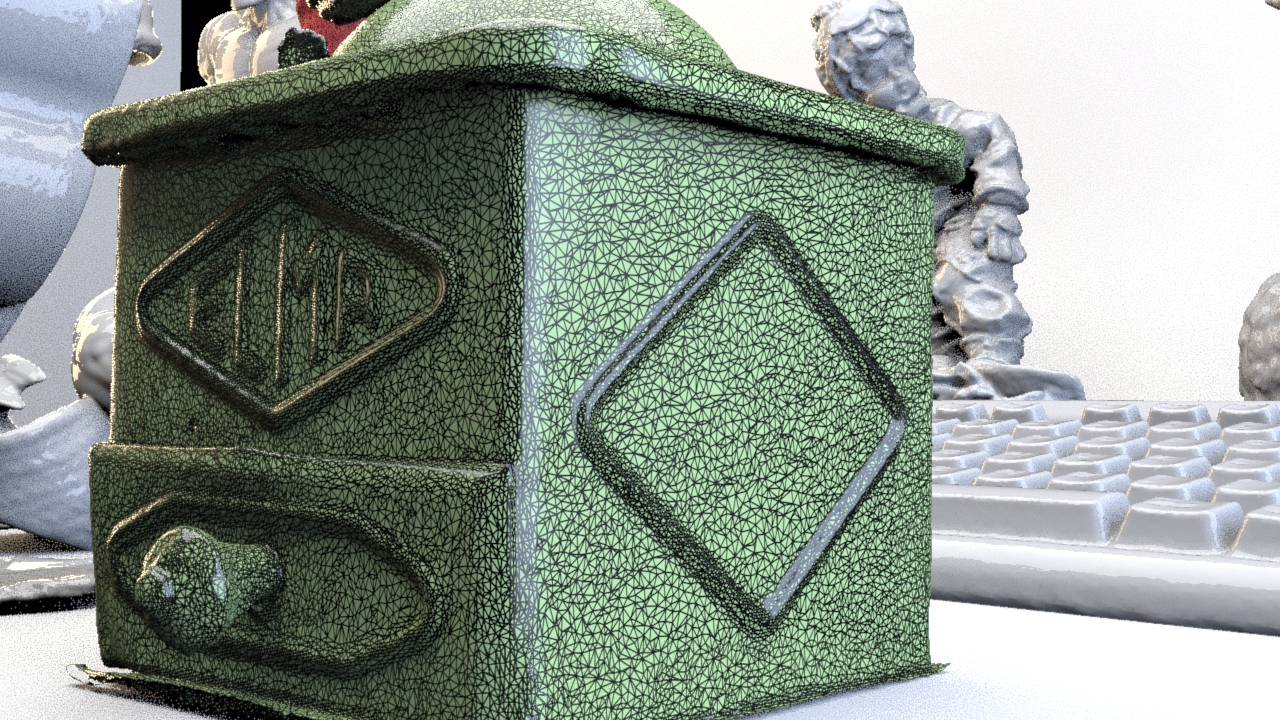
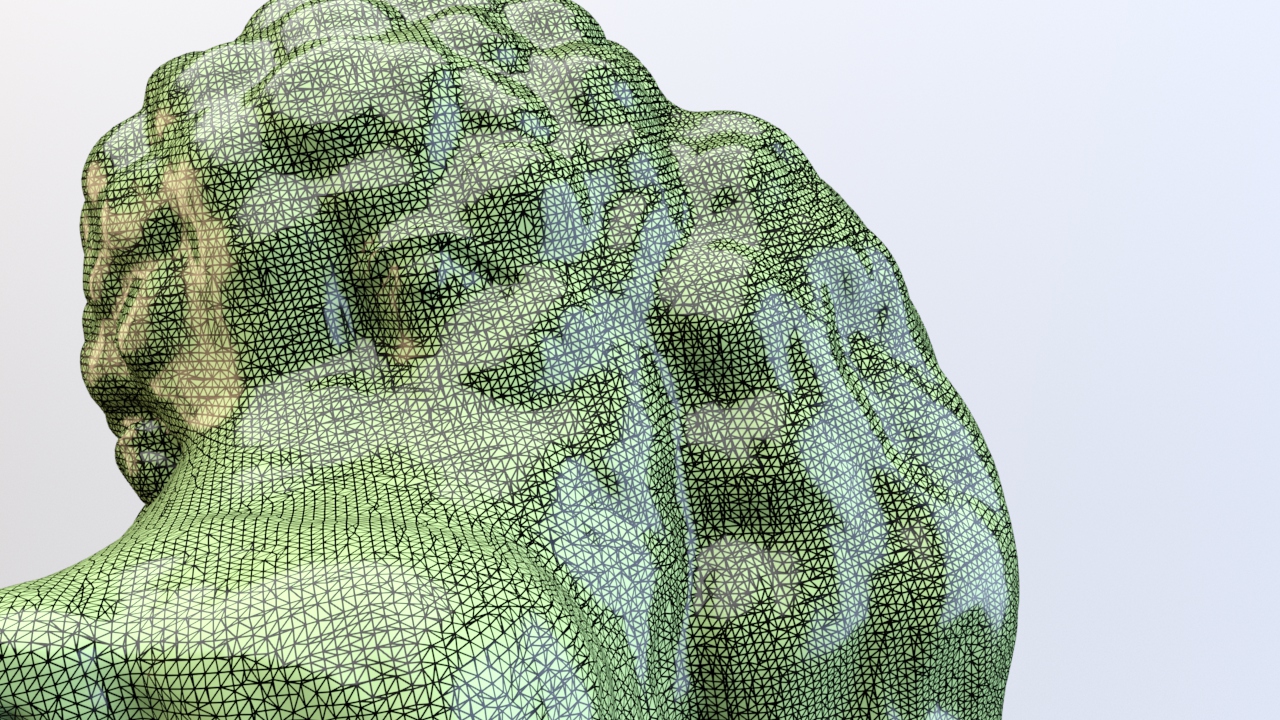
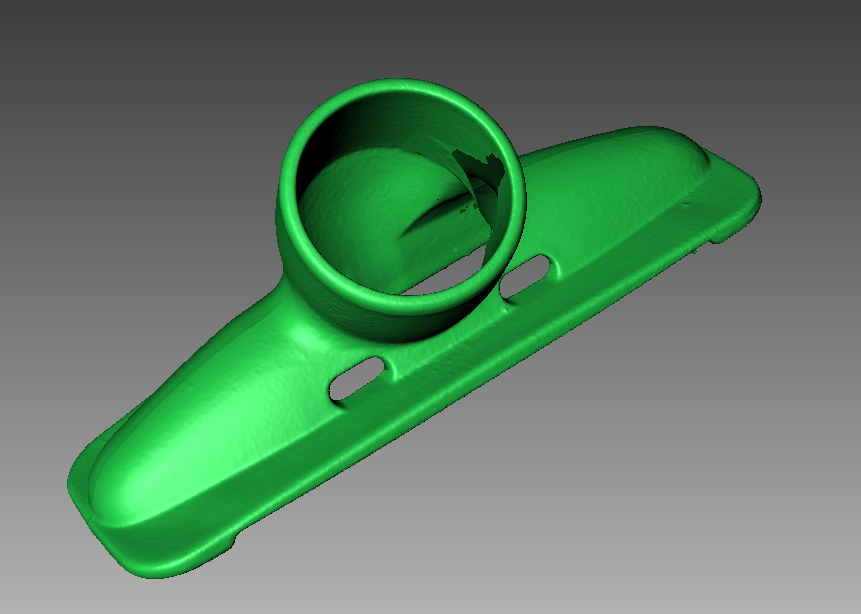
Estos modelos 3D son mallas de puntos o triángulos que representan la superficie externa del objeto que hemos escaneado.
Para reconstruir el objeto, se requiere un postprocesado en el ordenador. Posteriormente se puede imprimir en 3D y/o crear sólidos 3D paramétricos.




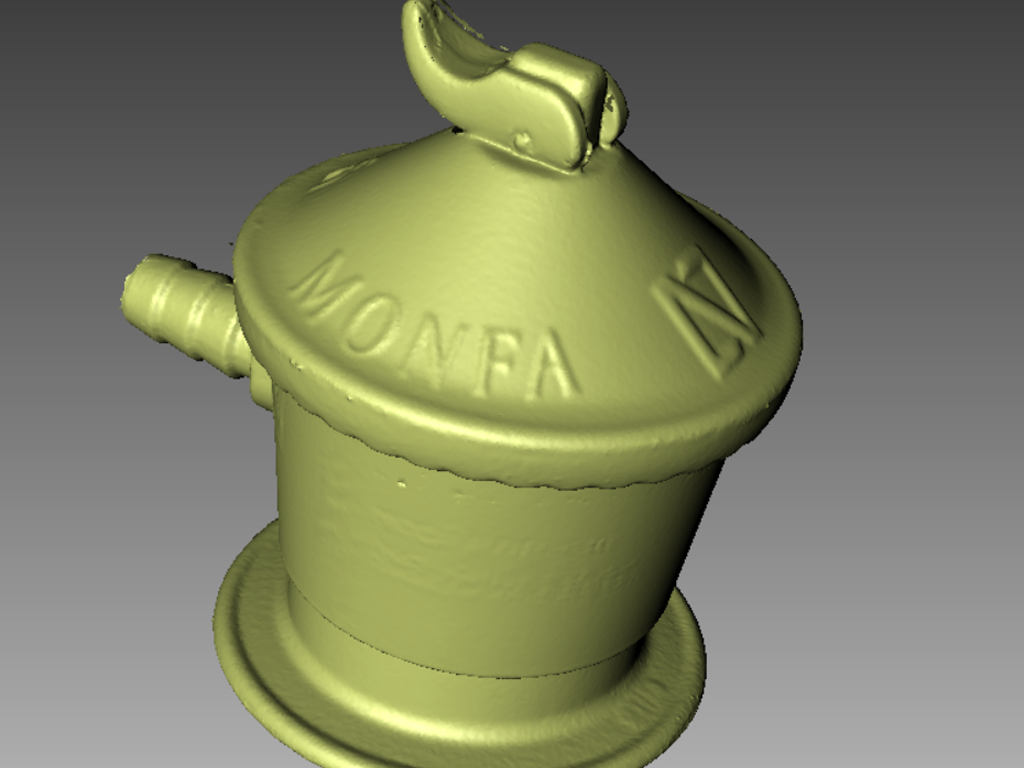
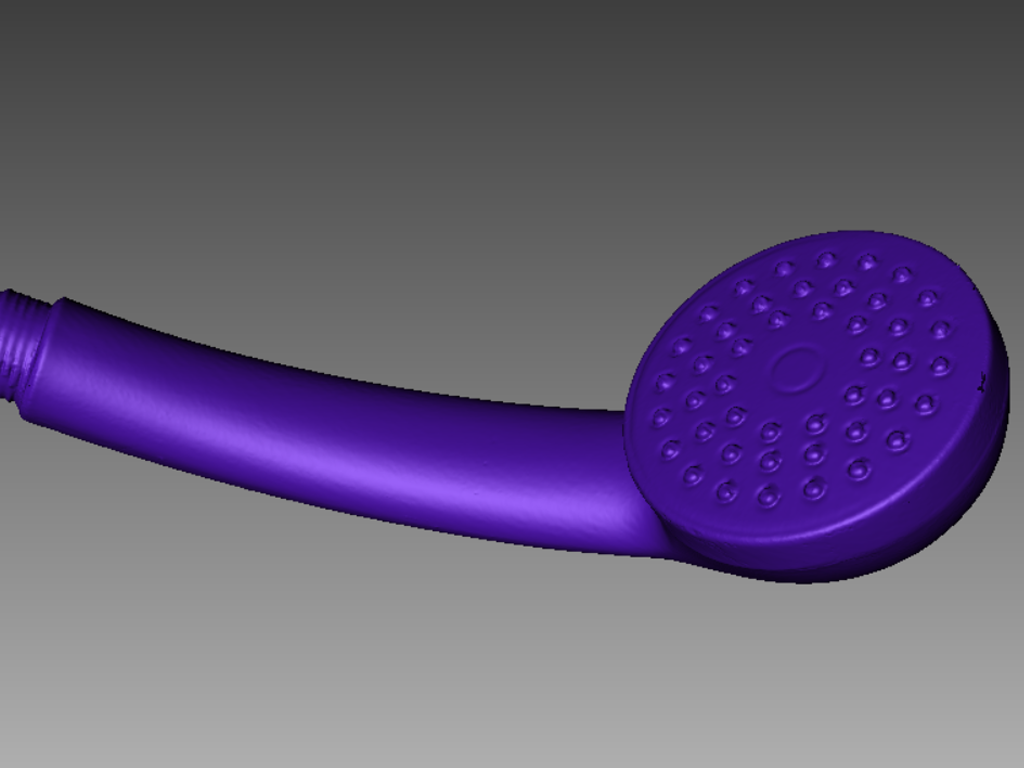
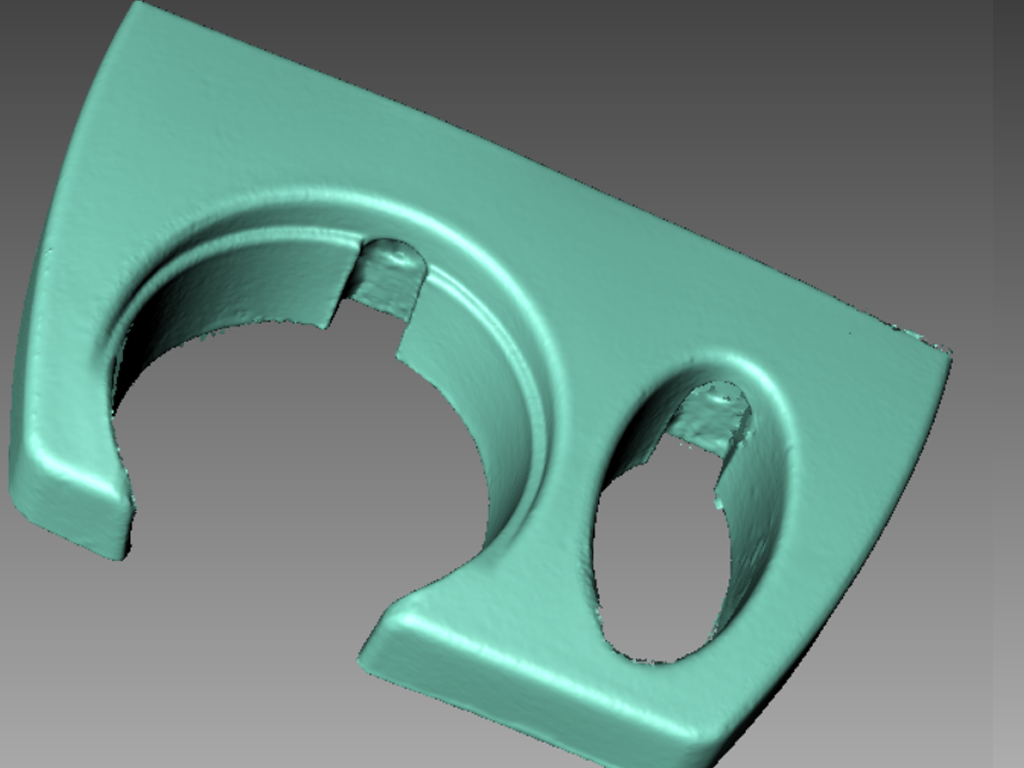
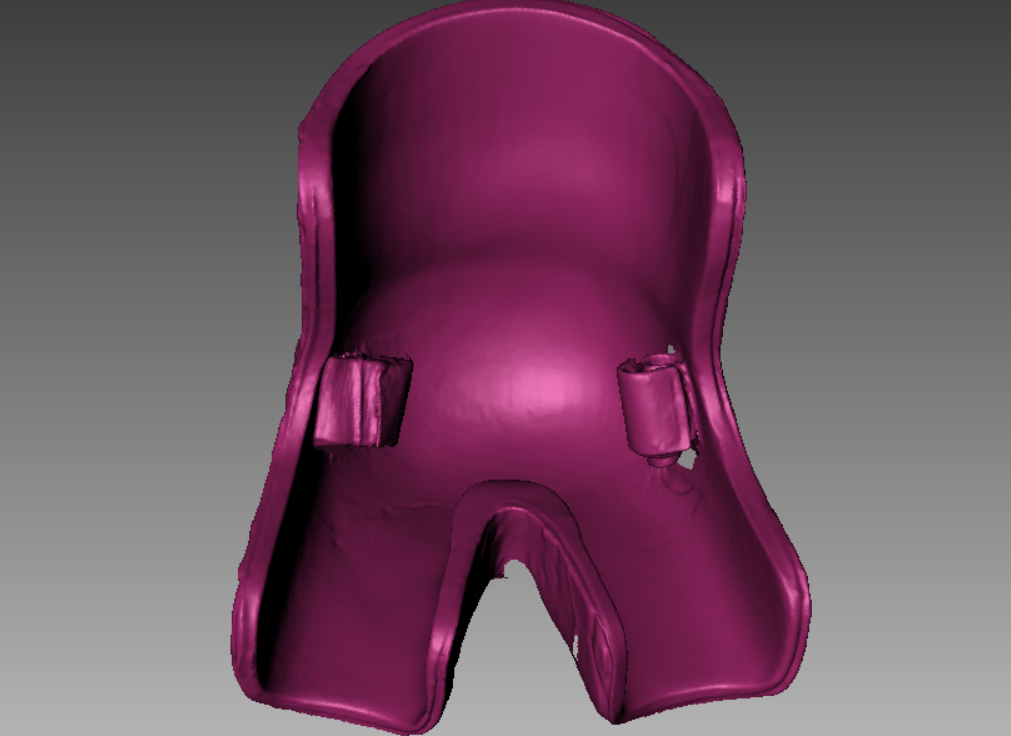
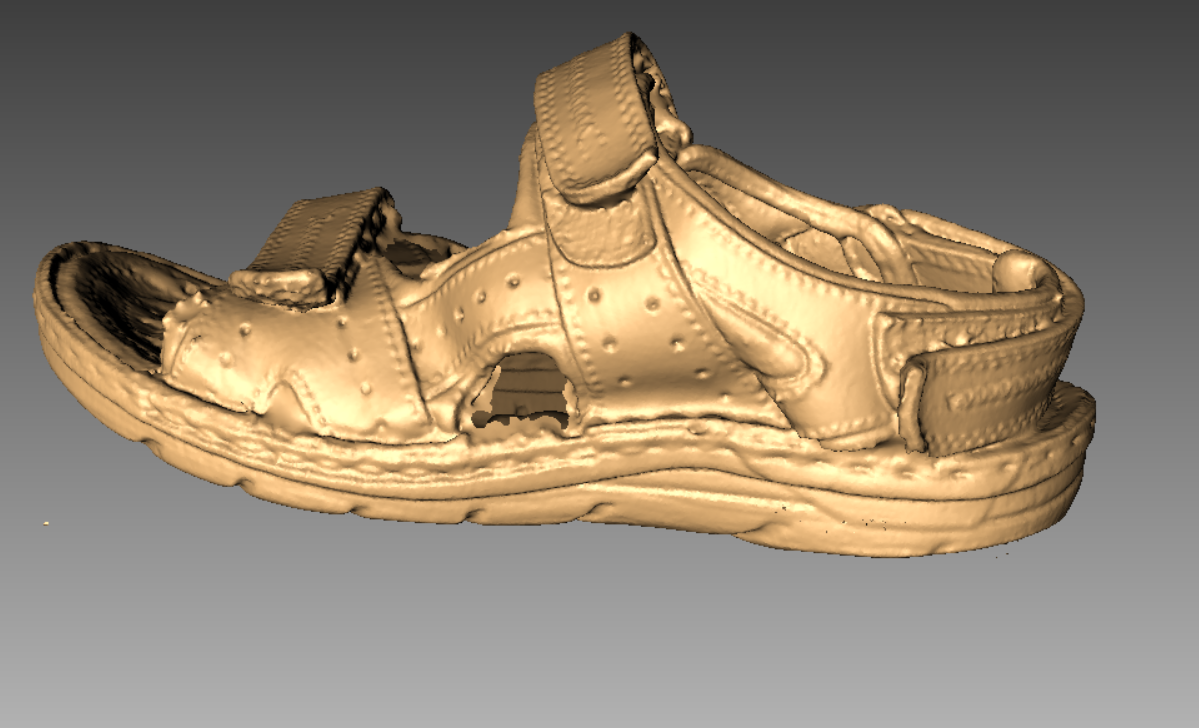
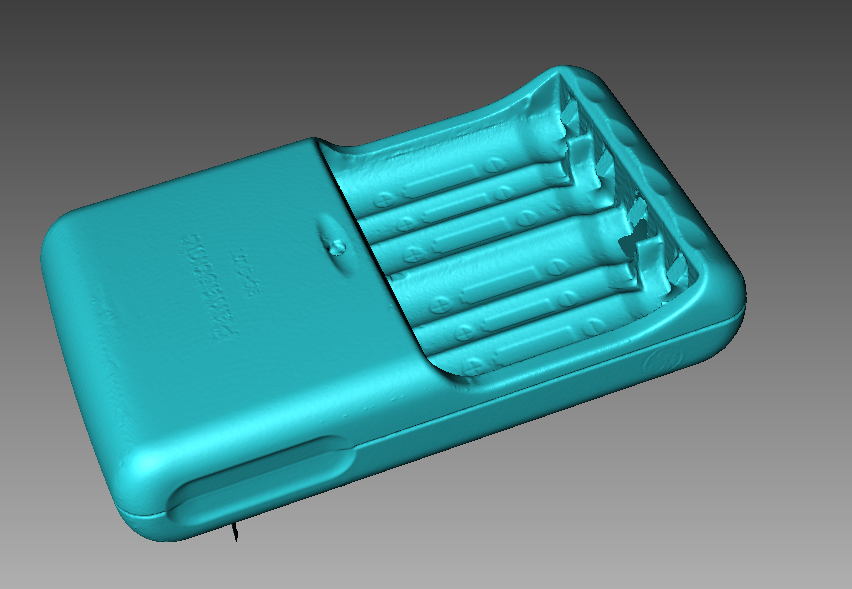
Últimos objetos escaneados para obtener modelo 3D

Figuras escaneadas, convertidas a mallas de triángulos que representan la superficie externa del objeto que hemos medido.
